使用領域。低電力非同期モーター (15 ~ 600 W) が使用されています。 自動装置ファン、ポンプ、その他の速度制御を必要としない機器を駆動するための家電製品。 家庭用電化製品や自動装置では、通常、単相ネットワークから電力が供給されるため、単相マイクロモーターが使用されます。 交流電流.
単相モーターの動作原理と設計。単相モーターの固定子巻線 (図 4.60、 A)固定子の円周の約 3 分の 2 を占める溝に配置されており、これは一対の極に対応します。 結果として
(第 3 章を参照) MMF の分布とエアギャップ内の誘導は正弦波に近くなります。 交流が巻線を通過するため、MMF はネットワークの周波数に合わせて脈動します。 エアギャップ内の任意の点での誘導
B× = in m sinωtcos (πх/τ).
したがって、単相モーターでは、固定子巻線は、対称電源を備えた三相モーターのような円形の回転磁束ではなく、時間とともに変化する定常磁束を生成します。
単相モーターの特性の解析を単純化するために、(4.99) を次の形式で提示しましょう。
B x = 0.5V t sin (ωt - πх/τ) + 0.5V t sin (ωt + πх/τ)、.
つまり、定常脈動流を、反対方向に回転し、同じ回転周波数を持つ同一の円形場の合計で置き換えます。 n 1pr = n 1回転 = n 1. 円形の回転磁界を持つ非同期モーターの特性については、§ 4.7 ~ 4.12 で詳しく説明されているため、単相モーターの特性の解析は、各回転磁界の複合動作を考慮することに帰着できます。 言い換えれば、単相モーターは 2 つの同一のモーターとして表すことができ、そのローターは互いにしっかりと接続されており (図 4.60、b)、磁場とそれらのモーターが逆方向に回転することによって生成されるトルクを備えています。 Mで Mああ。 回転方向がローターの回転方向と一致する磁場を直接といいます。 逆方向フィールド - 逆または逆。
ローターの回転方向が回転場の 1 つの方向、たとえば n ave と一致すると仮定します。 F等
s pr = (n 1pr - n 2)/n 1pr = (n 1 - n 2)/n 1 = 1 - n 2 /n 1。.
流量 F arr に対するローターのスリップ。
s arr = (n 1arr + n 2)/n 1arr = (n 1 + n 2)/n 1 = 1 + n 2 /n 1。.
(4.100) と (4.101) から、次のことがわかります。
s o6p = 1 + n 2 /n 1 = 2 - s pr..
電磁モーメント Mで M順磁界と逆磁界によって生成される逆磁界は反対方向に向けられ、その結果生じる単相モーターのトルク Mレス 差に等しい同じローター速度での瞬間。
図では、 4.61 は依存関係を示します M = f(s)単相モーターの場合。 この図を見ると、次の結論を導き出すことができます。
a) 単相モーターには始動トルクがありません。 外力によって駆動される方向に回転します。 b) 逆界磁によって発生する制動トルクの存在により、アイドル時の単相モーターの回転速度は三相モーターの回転速度よりも低くなります。
c) 単相モーターの性能特性は三相モーターの性能特性より悪い。 定格負荷時の滑りが増加し、効率が低下し、過負荷容量が低下します。これは、逆磁界の存在によっても説明されます。
d) 単相モーターでは動作巻線が固定子スロットの 2/3 しか占有しないため、単相モーターの出力は同じサイズの三相モーターの出力の約 2/3 です。 すべてのステータースロットを埋める
この場合、巻線係数が小さいため、銅の消費量は約 1.5 倍になりますが、電力は 12% しか増加しません。
デバイスを起動します。入手するには 始動トルク、単相モーターには、主動作巻線に対して電気角で 90 度シフトされた始動巻線があります。 始動期間中、始動巻線は移相要素 (静電容量またはアクティブ抵抗) を介してネットワークに接続されます。 エンジンの加速終了後、始動巻線はオフになり、エンジンは単相として動作し続けます。 始動巻線だけしか作動しないので 短時間、それは実際に使用されているものよりも小さな断面のワイヤーで作られており、より少ない数の溝に配置されています。
静電容量 C を移相要素として使用する場合の起動プロセスを詳しく考えてみましょう (図 4.62、a)。 巻き始めで P電圧
Ú
1p = Ú
1 - Ú
C= Ú
1 +jÍ1 P XC、つまり、主電源電圧に対して位相がシフトされています。 U 1 は作業巻線に取り付けられます R。 したがって、動作中の現在のベクトルは、 私 1Pとランチャー 私 1p 巻線は特定の角度だけ位相がシフトします。 移相コンデンサの静電容量を特定の方法で選択することにより、起動時に対称に近い動作モード (図 4.62、b)、つまり円形の回転磁界を得ることができます。 図では、 4.62、依存関係が表示される M = f(s)始動巻線がオンになった状態 (曲線 1) とオフになった状態 (曲線 2) のエンジンの場合。 エンジンは部分的に始動します 腹筋特徴1。 時点で b始動巻線がオフになり、エンジンが部分的に作動します ОО特徴2.
二次巻線をオンにすると大幅に改善されるため、 機械的特性モーター、場合によっては単相モーターが使用され、巻線 A と B
常にオンになっています (図 4.63、a)。 このようなモーターはコンデンサーモーターと呼ばれます。
通常、コンデンサモーターの両方の巻線が占有されます。 同じ番号スロットと同じ電力を持ちます。 コンデンサモータを始動する場合、始動トルクを高めるために、特性 2 (図 4.63、b) に従ってモータを加速し、電流を減少させた後、コンデンサの一部を増加させることをお勧めします。 Cn がオフになると、定格モード (始動時よりもモーター電流が小さくなるとき) で静電容量が増加し、円形回転磁界での動作に近い条件でのエンジン動作が保証されます。 この場合、エンジンは特性 1 で動作します。
コンデンサーモーターはcosφが大きいです。 欠点は、コンデンサの質量と寸法が比較的大きいことと、電源電圧が歪んだときに非正弦波電流が発生し、場合によっては故障につながることです。 有害な影響通信回線上で。
始動が容易な条件(始動時の負荷トルクが小さい)では、始動抵抗のあるモーターを使用 R(図4.64、a)。 始動巻線回路にアクティブな抵抗が存在するため、この巻線の電圧と電流の間の位相シフト φ p は、動作巻線の位相シフト φ p よりも小さくなります (図 4.64、b)。 この点において、作動巻線と始動巻線の電流は角度φ p - φ p だけ位相がシフトされ、非対称(楕円)回転磁界を形成し、これにより始動トルクが発生します。 始動抵抗を備えたモーターは動作の信頼性が高く、量産されています。 始動抵抗はモーターハウジングに組み込まれており、モーター全体を冷却するのと同じ空気によって冷却されます。
シールド極を備えた単相マイクロモーター。これらのモーターでは、ネットワークに接続された固定子巻線は通常、突極に集中して取り付けられており (図 4.65、a)、そのシートは固定子と一緒に打ち抜かれています。 各極では、先端の 1 つが、極アークの 1/5 ~ 1/2 をシールドする 1 つ以上の短絡ターンで構成される補助巻線で覆われています。 モーターローターは従来のかご形タイプです。
固定子巻線によって生成される機械の磁束 (極磁束) は、2 つの成分の合計 (図 4.65、b) F p = F p1 + F p2 として表すことができます。ここで、F p1 は部品を通過する磁束です。このねじれによる短絡によって覆われていない極の。 F p2 は、短絡コイルによってシールドされた極の部分を通過する磁束です。
流れФп1とФп2は磁極片の異なる部分を通過します。つまり、それらは角度βだけ空間内で変位します。 さらに、MMF に対して位相がシフトされています。 F異なる角度の n 個の固定子巻線 - γ 1 と γ 2。 これは、説明したモータの各極を、第一近似的に、一次巻線が固定子巻線であり、二次巻線が短絡巻線である変圧器とみなすことができるという事実によって説明される。 固定子巻線の磁束により、短絡したコイルに起電力が誘導されます。 E(図 4.65、c)、その結果として電流が発生します。 私 kとMDS F k、MDS 付き折りたたみ F n 固定子巻線。 無効電流成分 私 k は流量 Ф p2 を減少させ、アクティブな流量は MMF に対して位相をシフトします。 F p. 流れ Ф p1 は短絡ターンをカバーしないため、角度 γ 1 は相対的に大きくなります。 ささいなこと(4-9°) - モードにおける変圧器の磁束と一次巻線の MMF の間の位相シフト角とほぼ同じ アイドルムーブ。 角度 γ 2 ははるかに大きい (約 45°)、つまり、 二次巻線短絡(たとえば、測定用変流器内)。 これは、角度γ 2 が依存する電力損失が鋼の磁気電力損失だけでなく、短絡ターンの電気損失によっても決定されるという事実によって説明される。
米。 4.65。 シールド極を備えた単相モーターとその設計図
ベクトル図:
1
- ステーター; 2 -
固定子巻線。 3 -
短絡した
振り向く; 4 -
ローター; 5
- ポール
Фп1 と Фп2 の流れは、空間内で角度 β だけ変位し、時間的に角度 γ = γ 2 - γ l だけ位相がシフトし、楕円形の回転磁場を形成し (第 3 章を参照)、これが回転子に作用するトルクを生成します。モーターは、短絡ターンによって覆われていない最初の磁極片から 2 番目の先端に向かう方向に (「相」の最大磁束の交互に応じて) 進みます。
エンジンの回転磁界を円形に近づけて始動トルクを高めるには、 さまざまな方法: 磁気シャントが隣接する極のポールピース間に設置され、主巻線と短絡ターン間の磁気接続が強化され、エアギャップ内の磁場の形状が改善されます。 短絡ターンによってカバーされない先端の下の空隙を増やす。 2つ使って、 大量片方のチップを短絡するとオンになります さまざまな角度カバレッジ。 極に短絡ターンがなく、非対称の磁気システムを備えたモーターもあります。構成は異なります。 個々の部品極と異なるエアギャップ。 このようなモーターは、影付きの極を備えたモーターよりも始動トルクが低くなりますが、短絡ターンでの電力損失がないため、効率は高くなります。
影付きの極を備えたモーターの検討された設計は元に戻すことができません。 このようなエンジンで逆転を実現するには、短絡ターンの代わりにコイルが使用されます。 B1、B2、B3そして AT4(図4.65、 V)、それぞれがポールの半分をカバーします。 一対のコイルを短絡する 1でそして AT4または AT2そして AT3極の一方またはもう半分をシールドすることで、磁場とローターの回転方向を変えることができます。
影付きのポールモーターには、いくつかの機能があります。 重大な欠点:比較的大きい 寸法そして質量。 低cos φ ≈ 0.4 ÷ 0.6; 短絡したコイルの損失が大きいため、効率が低くなります η = 0.25 ÷ 0.4。 エンジンの利点は、設計が簡単であり、その結果動作の信頼性が高いことです。 ステータに歯がないため、モーターの騒音が小さいため、音楽や音声を再生する機器によく使用されます。
AC電圧の変換が容易なため、電力供給に最も広く使用されています。 電気モーターの設計の分野では、交流のもう 1 つの利点が発見されました。それは、追加の変換を行わずに、または最小限の変換で回転磁界を生成できることです。
したがって、巻線の無効(誘導)抵抗による一定の損失にもかかわらず、AC 電気モーターの作成が容易であることが、20 世紀初頭の DC 電源に対する勝利に貢献しました。
基本的に、AC 電気モーターは 2 つのグループに分類できます。
非同期
それらでは、ローターの回転は磁場の回転とは速度が異なるため、さまざまな速度で動作できます。 このタイプの AC モーターは現在最も一般的です。 同期
これらのモーターでは、ローター速度と磁場の回転速度の間に厳密な関係があります。 これらは製造がより難しく、使用の柔軟性が低くなります(供給ネットワークの固定周波数での速度の変更は、ステーターの極の数を変更することによってのみ可能です)。
それらは以下でのみ使用されます。 ハイパワー非同期電気モーターと比較して効率が高いため、熱損失が大幅に削減されます。
AC電気モーター非同期
最も一般的なタイプの非同期モーターは、「かご型」タイプのかご型ローターを備えた電気モーターで、ローターの傾斜した溝に一組の導電性ロッドが配置され、両端がリングで接続されています。
このタイプの電気モーターの歴史は 100 年以上前に遡ります。交流電磁石のコアのギャップに導電性の物体を置くと、誘導起電力が発生してそこから抜け出す傾向があることに気づきました。逆のベクトルが入っています。
したがって、かご型ローターを備えた非同期モーターには、ローター支持ベアリング以外の機械的接触ユニットがありません。このため、このタイプのモーターには、 低価格、耐久性も最高です。 このおかげで、このタイプの電気モーターは現代の産業で最も一般的になりました。
ただし、このタイプの非同期電動機を設計する場合には、考慮する必要がある次のような欠点もあります。
高い始動電流– 非同期ブラシレス電気モーターがネットワークに接続されている時点では、ステーター巻線のリアクタンスはローターによって生成される磁界の影響をまだ受けていないため、定格消費電流の数倍を超える強力な電流サージが発生します。 。
このタイプのモーターの動作に関するこの機能は、特に非同期電気モーターを電力が限られた移動式発電機に接続する場合、過負荷を回避するために、すべての設計電源に組み込む必要があります。
始動トルクが低い– かご型巻線を備えた電気モーターは、トルクが速度に顕著に依存するため、負荷がかかった状態でモーターをオンにすることは非常に望ましくありません。公称モードに達するまでの時間が大幅に増加し、始動電流が増加し、固定子巻線が過負荷になります。
これは、たとえば、電源をオンにしたときに発生します。 深井戸ポンプ– 電源の電気回路では、5 ~ 7 倍の電流予備を考慮する必要があります。
単相電流回路では直接始動が不可能- ロータが回転を開始するには、開始プッシュ、または相互に位相をずらした追加の相巻線の導入が必要です。
まずは 非同期電動機単相ネットワークの AC では、ローターの回転後にオフになる手動で切り替えられる始動巻線、または移相要素 (ほとんどの場合、必要な容量のコンデンサ) を介して接続された 2 次巻線のいずれかを使用します。
高い回転速度が得られない- ローターの回転はステーターの磁場の回転周波数と同期していませんが、それを進めることはできないため、ネットワークは 50 Hz です 最大速度かご型ローターを備えた非同期電気モーターの場合 – 3000 rpm 以下。
非同期モーターの回転速度を上げるには、 周波数変換器(インバーター)、このようなシステムはブラシ付きモーターよりも高価になります。 さらに、周波数が高くなると無効損失も増加します。
逆に整理するのが難しい- これには、単相バージョンではエンジンの完全な停止と相の再切り替えが必要です。つまり、始動または第 2 相巻線の位相シフトが必要になります。
産業用三相ネットワークでは非同期電動機を使用するのが最も便利です。これは、回転磁界の生成が追加の装置なしで相巻線自体によって実行されるためです。
実際、三相発電機と電気モーターで構成される回路は、送電の一例と考えることができます。発電機の駆動により回転磁界が発生し、その回転磁界が振動に変換されます。 電流、次に電気モーター内の磁場の回転を励起します。
さらに、非同期電動機の効率が最も高くなるのは三相電源の場合です。これは、単相ネットワークでは固定子によって生成された磁場が基本的に 2 つの逆位相磁場に分解され、過飽和による無駄な損失が増加するためです。コアの。 したがって、強力な単相電気モーターは通常、整流子回路を使用して作られます。
AC電動モーターコレクター
電気モーターの場合 このタイプの回転子の磁界は、整流子に接続された相巻線によって生成されます。 実はブラシ付きACモーターはモーターとは違います 直流巻線のリアクタンスが計算に含まれているからです。
場合によっては、汎用整流子モーターが作成されることもあります。 固定子巻線交流ネットワークに含めるために不完全な部分からタップがあり、巻線の全長に直流電源を接続できます。
このタイプのエンジンの利点は明らかです。
高速動作能力電気ドリルでおなじみの、毎分数万回転までの回転速度を持つ整流子電動モーターを作成できます。
追加の必要はありません 起動装置 かご型モーターとは対照的です。
高い始動トルクこれにより、負荷時を含む動作モードへの復帰が高速化されます。 また、整流子電動機のトルクは速度に反比例するため、負荷が増加しても回転速度の低下を避けることができます。
速度制御のしやすさ- 供給電圧に依存するため、回転速度を最も広い制限内で調整するには、単純なトライアック電圧レギュレータがあれば十分です。 レギュレーターが故障した場合、整流子モーターをネットワークに直接接続できます。
ローター慣性の低減- 短絡回路を使用する場合よりもはるかにコンパクトに作ることができるため、整流子モーター自体が著しく小さくなります。
また、整流子モーターは簡単に反転することができます。これは、さまざまなタイプの電動工具や多数の工作機械を作成する場合に特に重要です。
これらの理由により、整流子モーターは、柔軟な速度制御が必要なすべての単相消費者、つまり手持ち式電動工具、掃除機、キッチン家電などに広く普及しています。 ただし、数値 デザインの特徴整流子電気モーターの動作の詳細を決定します。
整流子モーターでは、時間の経過とともに摩耗するブラシを定期的に交換する必要があります。 コレクター自体も磨耗しますが、かご型ローターを備えたエンジンは、上ですでに述べたように、ベアリングの交換頻度が低い限り、事実上永久に使用できます。
整流子とブラシの間で避けられない火花 (整流子電気モーターの動作中におなじみのオゾンの匂いが発生する理由) は、耐用年数をさらに短縮するだけでなく、故障の可能性があるため、動作中の安全対策を強化する必要があります。可燃性ガスや粉塵の発火。
© 2012-2017 無断複写・転載を禁じます。
このサイトに掲載されているすべての資料は情報提供のみを目的としており、ガイドラインや規制文書として使用することはできません。
3-7. 非同期単相電動機の装置
図では、 図 3-16 は非同期デバイスを示しています 単相電動機起動抵抗内蔵のAOLBタイプです。 電気モータのステータは、電気鋼の打ち抜きシート15から組み立てられ、二重壁13を備えたアルミニウムシェル(ステータハウジング)にプレスされ、注入される。ステータの表面を空冷するためのチャネルが壁の間に形成される。 アルミニウム合金から鋳造された 2 つのカバー 2 および 17 が、ステーター ハウジングの研ぎ部分に取り付けられます。
フロントカバー17には、端に穴が開いた打ち抜きキャップ18が被せられる。 これらの穴を通して、ローターが回転すると、ローターシャフトの端に取り付けられたファン 19 が空気を吸い込みます。 ファンはアルミニウム合金から鋳造されており、ネジでシャフトに固定されています。
ステーター シートには 24 個の洋ナシ型の溝が刻印されています。 これらのうち、16 スロットは動作巻線のワイヤによって占有され、8 スロットは始動巻線のワイヤによって占有されます。 作動巻線と始動巻線の出力端は、端子箱 11 内にある接続ネジ 4 に引き出されます。回転子コアは電磁鋼板 12 から組み立てられ、シャフト 1 の中央部分の波形表面に押し付けられます。ローターの溝に流し込みます アルミ巻線 14 閉鎖リングとファンブレード付き。 ファンの目的は、加熱された空気をケースの冷却された外壁に向けて放射することです。

始動巻線用の遠心スイッチがローターに取り付けられています。 これは、4 つのファンブレードに圧入された車軸 8 に取り付けられたカウンターウェイト 9 を備えた 2 つのレバー 7 で構成されています。 レバーはピン 6 でプラスチック スリーブ 5 に押し付けられ、プラスチック スリーブ 5 はシャフト上に緩く固定されています。 ローターが加速し、回転周波数が公称値に近づくと、遠心力の影響でカウンターウェイトが発散し、レバーが軸を中心に回転します。
この場合、スリーブ 5 が右に移動してスプリング 10 を圧縮し、スプリング接点 4 を解放して始動巻線回路を閉じます。 ローターが静止しているとき、この接点は固定接点 3 を備えたブッシュの端によって閉じられます。
可動接点と固定接点は、電気モーター 2 のバック カバーの絶縁板に取り付けられています。サーマル リレーがその上に取り付けられており、電気モーターが過熱したときにネットワークから電気モーターを切断します。 電気モーターの取り付けには、4 つのスタッドを備えたスタンド 16 が使用されます。
電動機の接続図を図に示します。 3-17.
電源電圧は端子 C1 と C2 に供給されます。 これらの端子から、巻線、バイメタル プレート、および接点で構成されるサーマル リレー RT の接点を介して、動作巻線に電圧が供給されます。 電気モーターが許容限界を超えて加熱すると、プレートが曲がり、接点が開きます。 で 短絡サーマルリレーの巻線に大電流が流れ、プレートが急速に加熱して接点が開きます。 この場合、動作中の C 巻線と始動用の P 巻線は両方ともサーマル リレーを介して電力が供給されているため、電力が供給されなくなります。 したがって、サーマルリレーは電気モーターを過負荷と短絡の両方から保護します。
始動巻線には、ジャンパ C2 - P1、遠心スイッチ VT の接点、ジャンパ VT - RT、サーマル リレー RT の接点を介して、端子 C1 および C2 から電力が供給されます。 電気モーターを始動するとき、ローターが定格速度の 70 ~ 80% の回転速度に達すると、遠心スイッチの接点が開き、始動巻線がネットワークから切断されます。 電気モーターがオンになり、ローター速度が低下すると、遠心スイッチの接点が再び閉じ、始動巻線が次の始動に備えて準備されます。
図では、 図 3-18 は、ABE タイプの非同期電気モーターの設計を示しています。これらのモーターは、常にオンになっている補助巻線を備えたネットワークに接続されており、その回路にはコンデンサが直列に接続されています (図 3-9)。 ABE タイプの電気モーターには剛性のハウジングがないため、ビルトインと呼ばれます。 電気モーターは、フランジまたはブラケットを使用して駆動機構に接続されます。
電気モーターのハウジングは、厚さ 0.5 mm の電磁鋼板で作られたステーター コア パッケージ 1 です。 パッケージは圧力下でプレスされ充填されます アルミニウム合金。 ステーターの端には圧力リング 5 とそれらを締め付ける 4 本のアルミニウム棒があります。 固定子スロットには、動作巻線と補助巻線のコイル 6 が含まれています。 ベアリングシールド4と 7. 巻線8の端部は、ベアリングシールド内のゴムブッシュ9を通して引き出され、ネットワークに接続される。 ベアリングシールドは4つのスタッドで固定されています。
電気モーターのローターは電磁鋼板から組み立てられ、アルミニウム 2 が充填されています。電気モーターを冷却するために、ローターの巻線とともにファンの翼が鋳造されます。 ローターは 2 つのボール ベアリング 3 で回転します。
電気モーターにはアルファベットとデジタルのタイプ指定があります。たとえば、AVE 041-2 電気モーターは次のように解読されます: A - 非同期、B - 内蔵、E - 単相、
4 はサイズ番号、1 はステータ コアの長さのシリアル番号、ダッシュで区切られた番号 2 は極数です。
3-8. 同期単相電動機
場合によっては電気モーターが必要になりますが、その回転速度は負荷に関係なく厳密に一定でなければなりません。 このため、同期電動機が使用され、回転子の回転速度は常に磁界の回転周波数に等しく、(3-2) によって決定されます。 同期電動機には、三相と単相の両方でさまざまな種類があります。 ここでは、単相同期電動機の最も単純な 2 つのタイプ、リラクタンスとコンデンサ リラクタンスのみを考慮します。
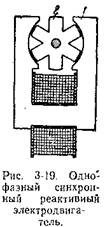
図では、 3-19を表示 設計図最も単純な単相リラクタンス モーターは、技術的には La Cura ホイールとして知られています。 ステータ 1 とロータ 2 は、打ち抜かれた電磁鋼板から組み立てられます。 単相交流ネットワークによって電力供給されるコイルがステーターに巻かれ、脈動磁界が生成されます。 リラクタンスモーターは、2 つの磁気引力の反作用によってローターが回転することからその名前が付けられました。
脈動磁場では、電気モーターには始動トルクがないため、手で回転させる必要があります。 ロータの歯に作用する磁力は常に、ロータの歯をステータの磁極の反対側に配置する傾向があります。この位置では磁束に対する抵抗が最小限になるからです。 ただし、ローターは、脈動磁場が減少する間に慣性によりこの位置を通過します。 次に磁場が増加すると、磁力がローターの別の歯に作用し、ローターの回転が継続します。 安定した動作のために、ジェットモーターのローターは高い慣性を持たなければなりません。
ジェットモーターは100~200rpm程度の低速回転でないと安定して動作しません。 通常、その電力は 10 ~ 15 W を超えません。 ロータの回転周波数は、供給ネットワークの周波数 f とロータの歯数 Z によって決まります。磁束変化の半サイクル中に、ロータは 1/Z 回転し、1 分間に 60 回転します。 2 f 半サイクル、60 2 f/Z 回転します。 交流周波数 50 Hz の場合、ローター速度は次のようになります。
![]()
トルクを増加するには、ステーターの歯の数が増加します。 最大の効果これは、ローターと同じ数の歯をステーターに作成することで実現できます。 この場合、ローターの1対の歯ではなく、すべての歯に磁気吸引力が同時に作用し、トルクが大幅に増加します。 このような電気モーターでは、固定子巻線は、歯の間のスペースで固定子のリムの周りに巻かれた小さなコイルで構成されています。 古いタイプの電動ターンテーブルでは、ステーターとローターに 77 個の歯を持つ電気モーターが使用されており、ディスク回転速度は 78 rpm でした。 ローターはレコードが置かれるディスクと一体化していました。 電気モーターを始動するには、指でディスクを押す必要がありました。
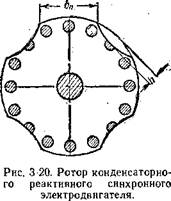
同期コンデンサ リラクタンス モータのステータは、コンデンサ非同期モータのステータと何ら変わりません。 電動機の回転子は、非同期電動機の回転子から、極数に応じて溝をフライス加工することで作成できます (図 3-20)。 この場合、リスかごの棒が部分的に切断されます。 ポールの突起が打ち抜かれたローターシートを備えたこのような電気モーターの工場生産では、かごのロッドの一部が始動巻線の役割を果たします。 ローターは、非同期電気モーターのローターと同じ方法で回転を開始し、その後同期に引き込まれます。 磁場その後同期速度で回転します。
仕事の質 コンデンサモーター電気モーターが円形の回転磁界を持つ動作モードに大きく依存します。 同期モードでは磁場の楕円率が原因で、騒音、振動が増大し、回転均一性が損なわれます。 円形の回転場が発生すると、 非同期モード、その場合、電気モーターの始動トルクは良好ですが、同期に入る瞬間と出る瞬間がわずかです。 円形磁場がより高い周波数にシフトすると、始動トルクが減少し、同期に入る瞬間と同期から出る瞬間が増加します。 同期に入るときと同期から出るときの最大の瞬間は、円形の回転フィールドが同期モードで発生する場合に得られます。 ただしこの場合、始動トルクは大幅に低下します。 これを増やすには、通常、短絡した回転子巻線のアクティブ抵抗をわずかに増加させます。
一部のタイプのコンデンサ リラクタンス モータの欠点は、ロータの固着です。これは、始動時にロータが回転せず、ある位置で停止することを意味します。
一般に、ローターの固着は、ディンプルのサイズとポールの突起の間に不幸な関係がある電気モーターで発生します。 電気モーターが消費する小さな電力で最高の反力トルクが得られるのは、極アーク b p と極分割 t の比が約 0.5 ~ 0.6 で、くぼみの深さ h が空気の 9 ~ 10 倍である場合です。ポールの突起とステーターの間のギャップ。
コンデンサ リラクタンス モーターの優れた特性は、力率が高いことであり、これは三相電気モーターよりも大幅に高く、0.9 ~ 0.95 に達する場合もあります。 これは、コンデンサ モータのインダクタンスがコンデンサの静電容量によって大幅に補償されるという事実によって説明されます。
シンクロナス リラクタンス モーターは、設計の単純さ、低コスト、滑り接点がないため、最も一般的な同期モーターです。 これらは、同期通信回路、サウンドシネマ、録音およびテレビ設備に応用されています。
3-9. 三相誘導電動機の単相モーターとしての使用
実際には、三相電気モーターを単相ネットワークに接続する必要がある場合があります。 以前は、これには電気モーターのステーターを巻き戻す必要があると考えられていました。 現在、三相電気モーターを接続するための多くの方式が開発され、実際にテストされています。 単相ネットワーク固定子巻線に変更を加える必要はありません。
コンデンサは始動要素として使用されます。
三相電気モーターの固定子巻線端子には次の名称があります。 C1 - 第 1 相の始まり。 C2 - 第 2 フェーズの始まり。 北西 - 第 3 フェーズの始まり。 C4 - 最初のフェーズの終了。 C5 - 第 2 フェーズの終了。 C6 - 第 3 フェーズの終了。 これらの指定は、巻線リード線に配置された金属タグに刻印されています。
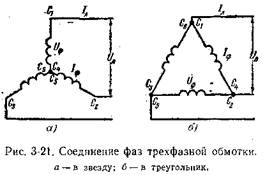
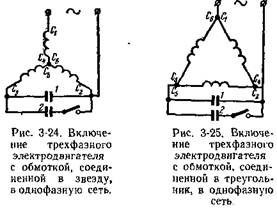
三相電気モーターの巻線は、星型 (図 3-21、a) または三角形 (図 3-21、b) で接続できます。 スター型に接続する場合、3 相すべての始点または終点が 1 点に接続され、残りの 3 つの端子が三相ネットワークに接続されます。 三角形に接続する場合、最初のフェーズの終わりは 2 番目のフェーズの始まりに、2 番目のフェーズの終わりは 3 番目のフェーズの始まりに、3 番目のフェーズの終わりは最初のフェーズの始まりに接続されます。 接続点からは、電気モーターを三相ネットワークに接続するためのリード線が取られます。
三相システムでは、相と線形の電圧と電流が区別されます。 スターに接続すると、それらの間に次の関係が生じます。
三角形に接続すると
ほとんどの三相電気モーターは、127/220 V または 220/380 V などの 2 つの線形電圧用に製造されています。電源電圧が低い場合、巻線は三角形に接続され、電圧が高い場合は星型に接続されます。 このような電気モーターの場合、巻線の 6 つの出力導体すべてが基板、つまりクランプに引き出されます。
ただし、1 つの主電源電圧用の電動機もあり、巻線は電動機内で星型または三角形に接続され、端子台には 3 本の導体のみが接続されます。 もちろん、この場合、電気モーターを分解し、相間の接続を切断し、さらに 3 つの結論を下すことが可能です。 ただし、以下に示す電気モーターを単相ネットワークに接続するための図のいずれかを使用してこれを行う必要はありません。
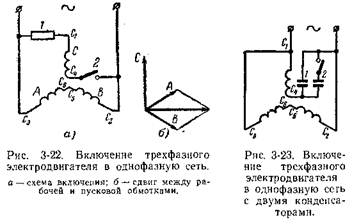
6 つの端子を持つ三相電気モーターを単相ネットワークに接続する概略図を図に示します。 3-22、a. これを行うには、2 つの相が直列に接続されて単相ネットワークに接続され、スイッチ 2 を備えた起動要素 1 を含む 3 番目の相がそれらに並列に接続されます。アクティブ抵抗またはコンデンサは、アクティブ抵抗またはコンデンサとして機能します。開始要素。 この場合、動作巻線は固定子スロットの 2/3 を占め、始動巻線は 1/3 を占めます。 したがって、 三相巻線作業巻線と開始巻線の間の必要な溝の比率を提供します。 この接続では、動作巻線と始動巻線の間の角度は 90° el になります。 (図 3-22、b)。
2 つの相を直列に接続する場合、n のときに逆ではなく、それに応じてオンになることを確認する必要があります。 と。 接続されている相の数が減算されます。 図の図からわかるように、 3-22、a、c 共通点第2相と第3相の端部C5とC6は接続されている。
三相電気モーターは、図の図に従ってコンデンサーモーターとしても使用できます。 3-23 1 つの動作コンデンサ 1 または動作コンデンサ 1 と起動コンデンサ 2 を使用します。 この接続方式では、動作コンデンサの静電容量 μF は次の式で決まります。
ここで、I は電気モーターの定格電流 A です。 U—主電源電圧、V。
3 つの端子とスター接続された固定子巻線を備えた三相電気モーターは、図の図に従って単相ネットワークに接続されます。 3-24. この場合、動作コンデンサの容量は次の式で決まります。
コンデンサ電圧 U 1 = 1.3 U。
3 つの端子と三角形に接続された固定子巻線を備えた三相電気モーターは、図の図に従って単相ネットワークに接続されます。 3-25。 動作コンデンサの容量は次の式で決まります。
コンデンサ電圧 U=1.15 V。
3 つのケースすべての容量 始動コンデンサの関係から近似的に決定できます
![]()
接続回路を選択するときは、三相電気モーターの設計電圧と単相ネットワークの電圧に基づいて選択する必要があります。 この場合、三相の相電圧は
例。電力 250 W、電圧 127/220 V、定格電流 2/1.15 A の三相電気モーターは、電圧 220 V の単相ネットワークに接続する必要があります。
図の図を使用すると、 3-24 動作コンデンサ容量:
![]()
コンデンサ両端の電圧 U 1 = 1.3 220 = 286 V。
始動コンデンサ容量
三相電動機を単相電動機として使用する場合は定格電力の50%に、単相コンデンサモータとして使用する場合は三相電動機の定格電力の70%に低減されます。モーター。
NV ヴィノグラドフ、Yu.N. ヴィノグラドフ
電動モーターを自分で計算して作る方法
モスクワ 1974
220V 単相電動モーターは別機構であり、さまざまな機器への搭載に広く使用されています。 家庭用にも産業用にも使用できます。 栄養 電気モーター通常のコンセントから実行され、少なくとも 220 ボルトの電力が必要です。 この場合、60ヘルツの周波数に注意する必要があります。
実際には、単相 220 V の電気モーターが、次のようなデバイスと一緒に販売されていることが証明されています。 エネルギーの変換を助ける 電界 、またコンデンサを使用して必要な電荷を蓄積します。 最新のモデルに従って製造されています。 革新的な技術、220V 電気モーターには、デバイスの作業場を照明するための装置がさらに装備されています。 これは内部部品と外部部品に当てはまります。
コンデンサ容量はすべての基本要件に従って保管する必要があることに留意することが重要です。 最良の選択肢- ここは 気温は変わらないそしていかなる変動も受けません。 部屋の中に 温度体制マイナス値まで下がってはいけません。
専門家は、エンジンの使用中、時々コンデンサの静電容量値を測定することを推奨しています。
誘導モーターは現在、さまざまな産業プロセスで広く使用されています。 この特定のモデルの電気モーターはさまざまな駆動装置に使用されます。 単相非同期設計木工機械、ポンプ、コンプレッサー、装置の駆動を助ける 産業用換気装置、コンベア、リフト、その他多くの機器。
電気モーターは小規模な機械化装置の駆動にも使用されます。 これらには、飼料チョッパーやコンクリートミキサーが含まれます。 このような構造物は、信頼できる供給者からのみ購入する必要があります。 ご購入前にメーカー適合証明書と保証書をご確認いただくことをお勧めします。
サプライヤーは顧客に以下のものを提供する必要があります サービスメンテナンス電気モーター故障や故障の場合。 これは、ポンプユニットの組み立て中に完成する主要コンポーネントの 1 つです。
既存の電動モーターシリーズ
今日 産業企業は、次の一連の単相 220V 電気モーターを製造しています。

絶対にすべてのエンジン デザインごとに分ける、設置方法および保護の程度に応じて。 これにより、構造を湿気や機械的粒子から保護できます。
Aシリーズ電動機の特長
A シリーズの単相電動モーターは、統一された非同期設計です。 それらはかご型ローターを使用して外部の影響から遮断されています。
電気モーターの構造には次の性能グループがあります。

単相 220V 電動機の価格はシリーズによって異なります。
エンジンにはどのような種類がありますか?
単相モーターは完成するように設計されています 電気ドライブ、家庭用および産業用の目的があります。 このようなデザインは州の基準に従って製造されています。







